Gallery

In six weeks, our team of four was to build a robot that could autonomously:
- navigate a narrow course, indicated by black electrical tape
- differentiate infrared signal frequencies to determine when to pass through a gate
- rescue toys from platforms above a pool of water
- transport them to safety by using a zipline
A more detailed overview of the competition can be found here.
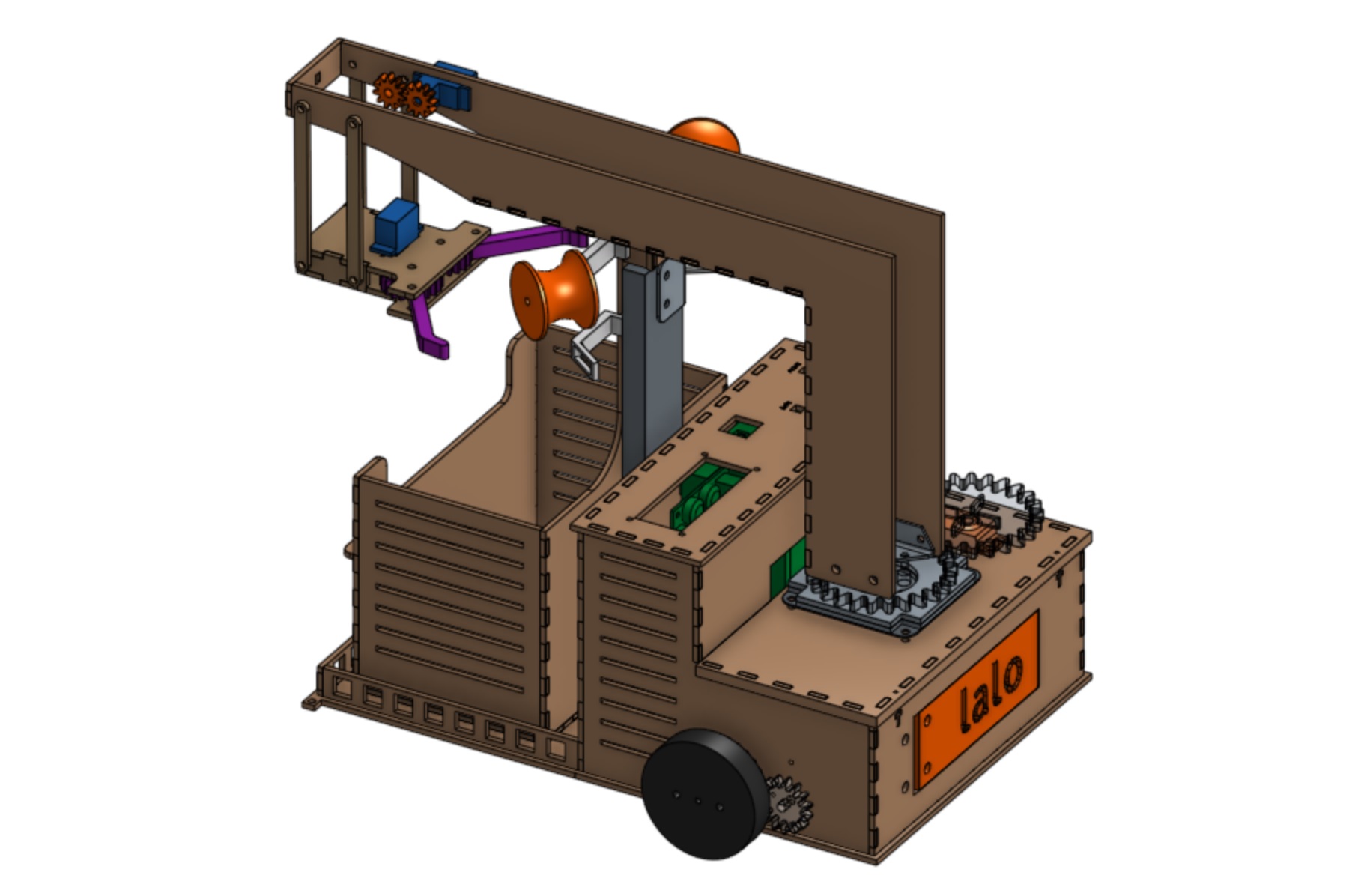
Our mechanical systems were modelled using OnShape and were fabricated with a
laser cutter, waterjet cutter, and 3D printer.
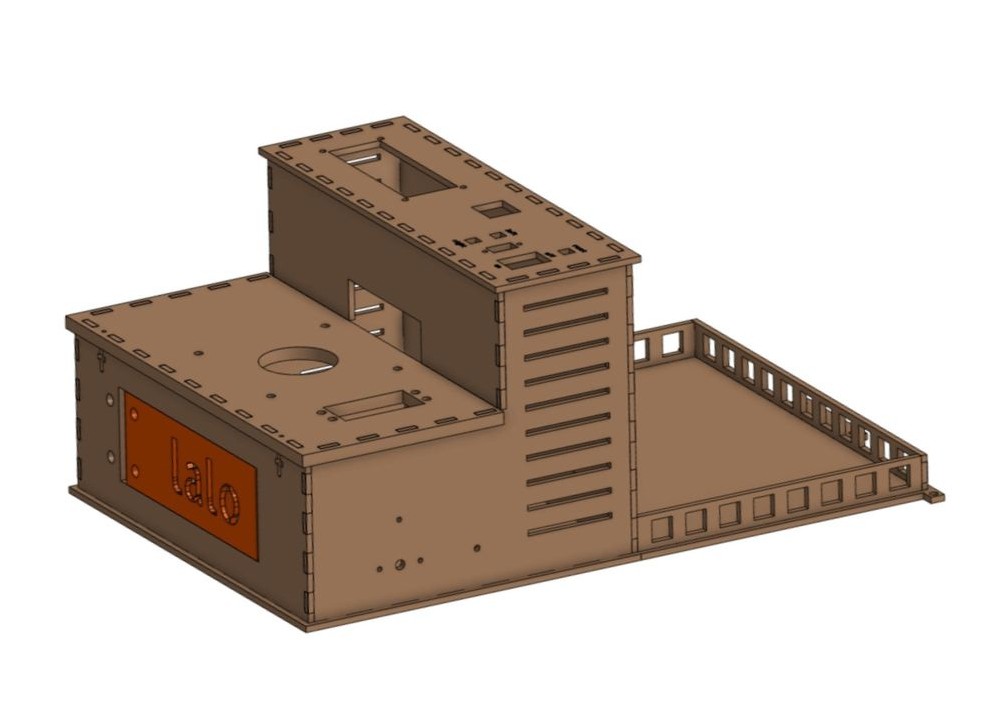
Lalo's Main Body
The chassis was constructed with laser-cut hard-board and assembled without the need for glue, making modification and internal access simple.
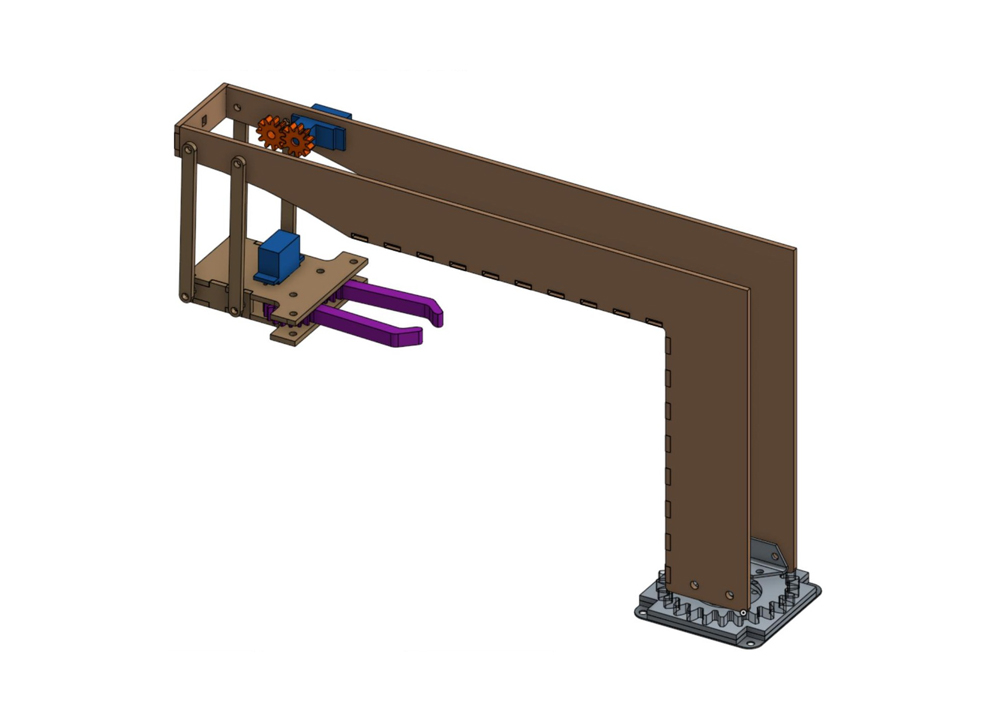
Method of Toy Retrieval
The claw arm was designed to reach over the toys and grab them from the middle of the basin. The single angle design was made to simplify programming and increase stability.
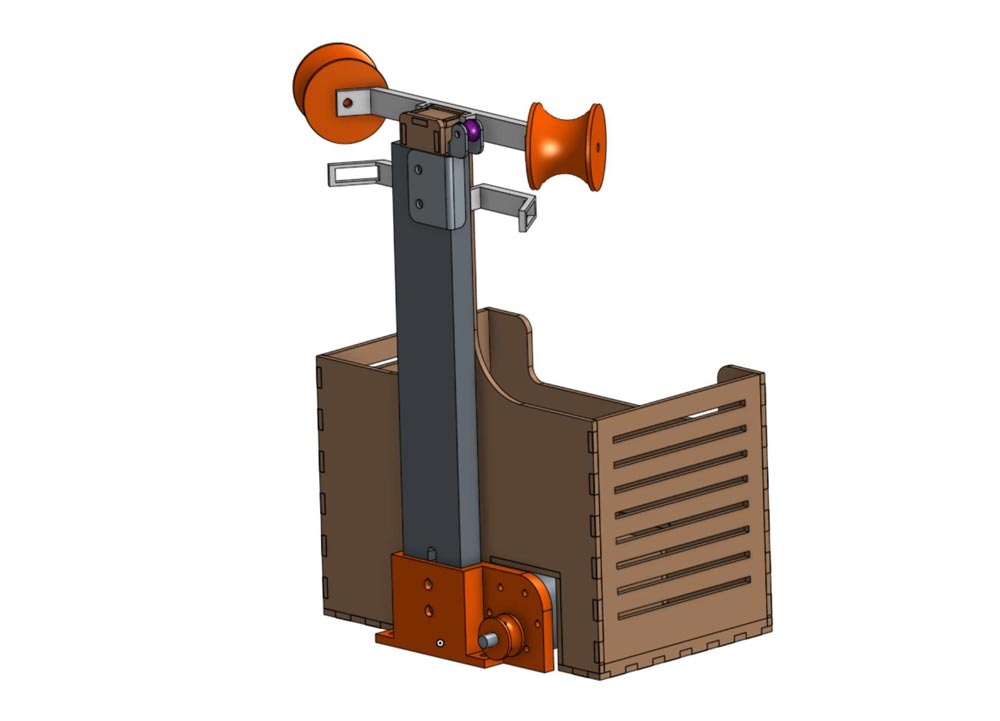
Mechanism for Zipline Placement
Using a pulley and a drawer slide, this mechanism was able to lift the collection box to the required height. Collision detection switches indicate when the zipline has been reached.
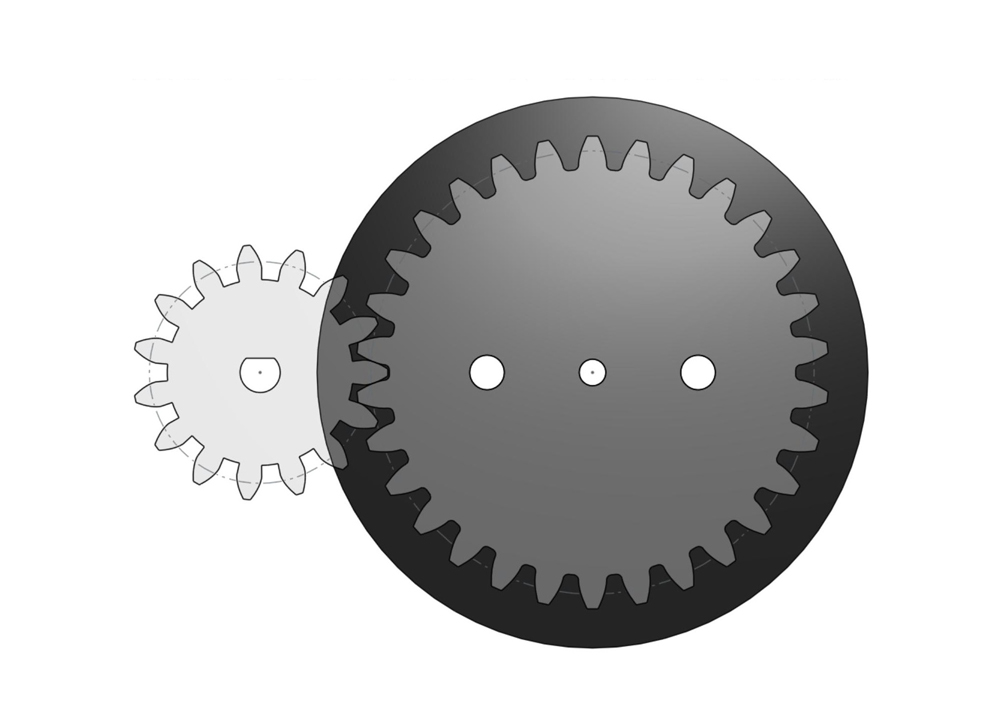
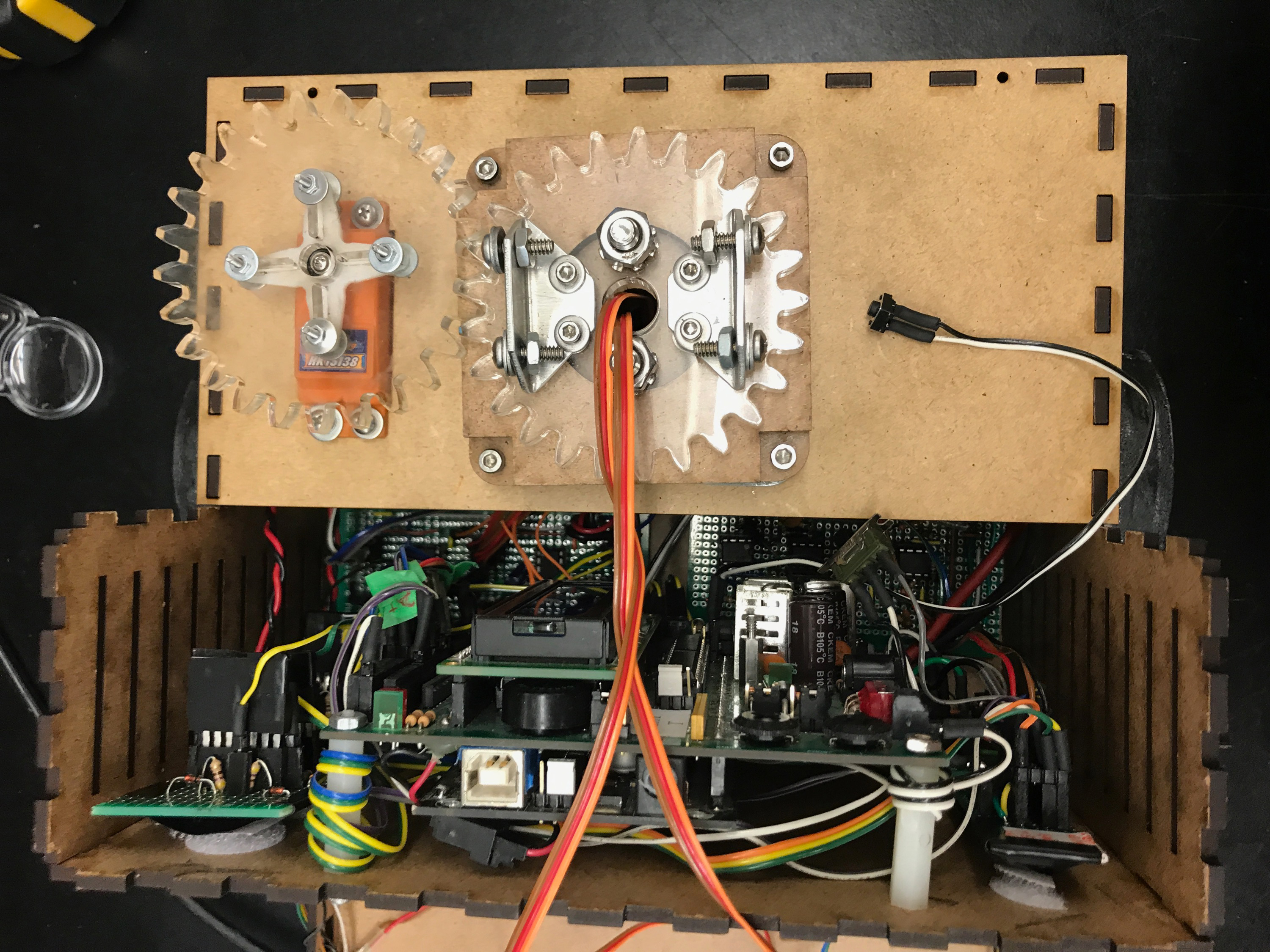
Mode of Travel
The gear system was used to achieve a balance between torque and drive velocity.
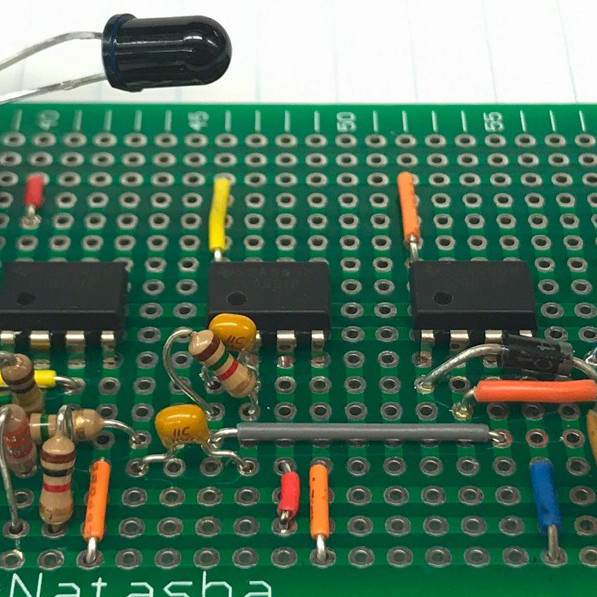
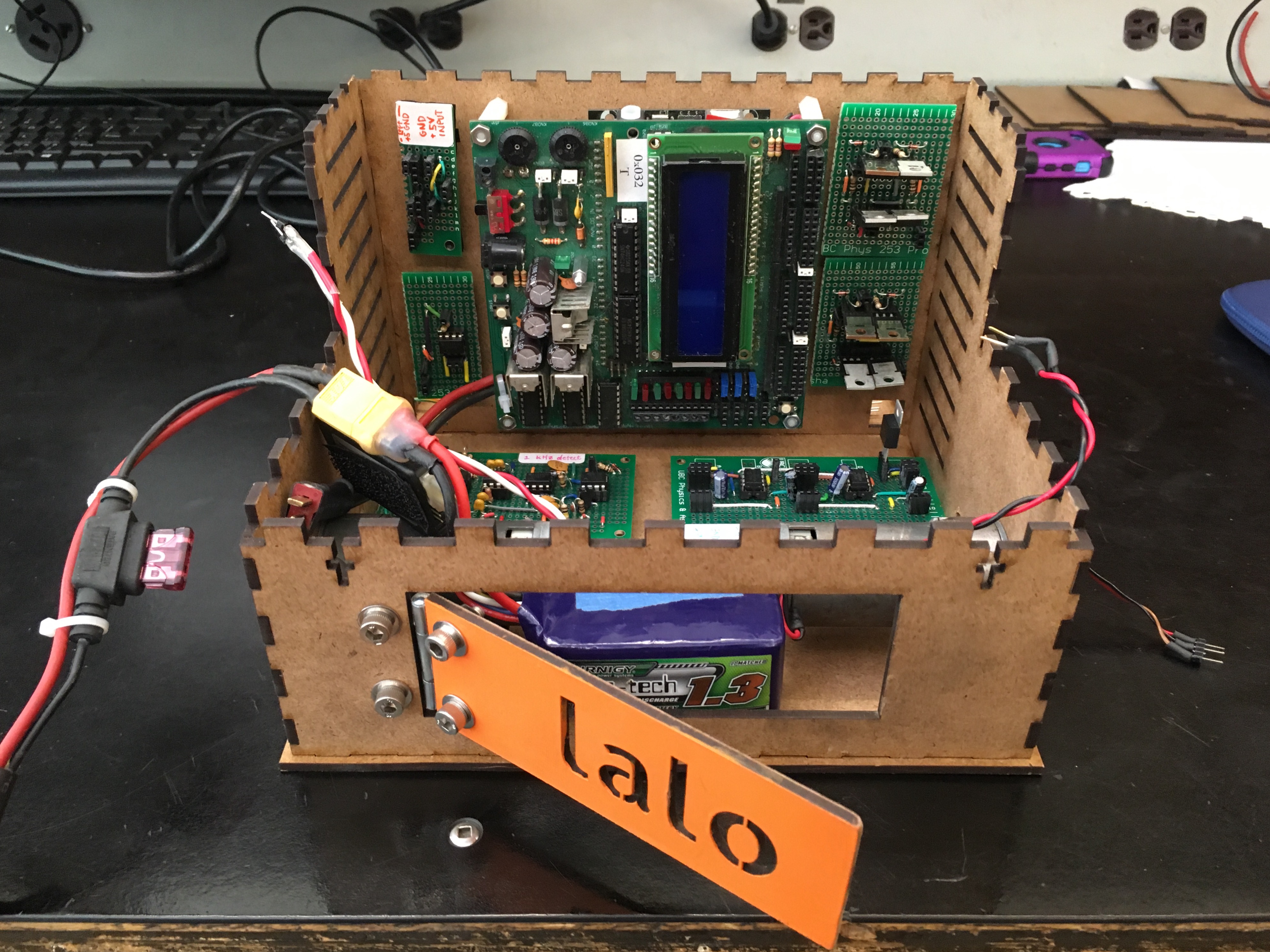
IR Peak Detection / Comparator Circuit
The IR signal was amplified, filtered, and put into a comparator in order for us to differentiate between the two frequencies.
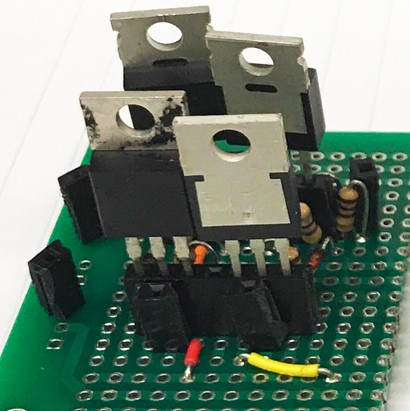
H-Bridge Circuits
Each high-torque motor was controlled using an external H-bridge circuit, allowing us to drive them at a higher current.
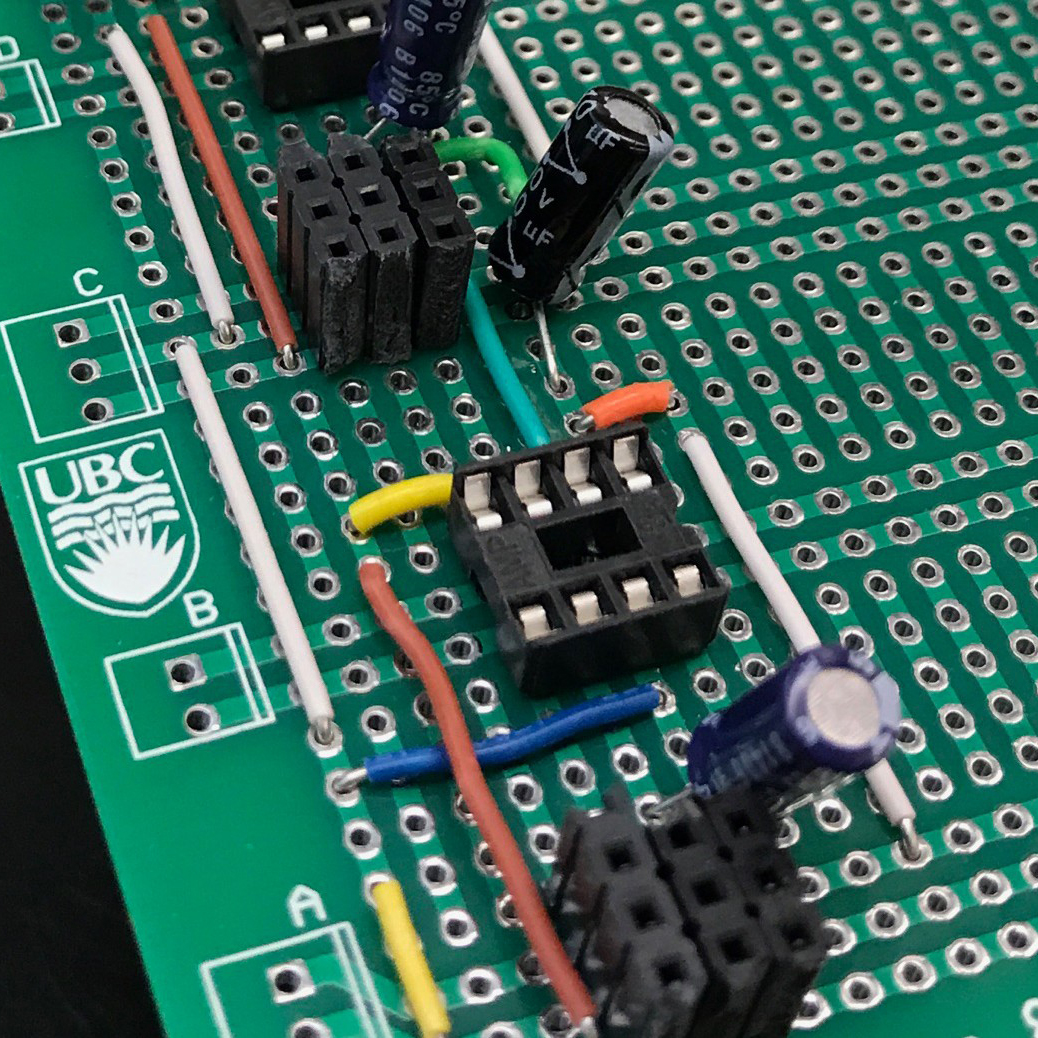
Voltage Distribution
The power was regulated to different voltages in order to be used by the other circuits.
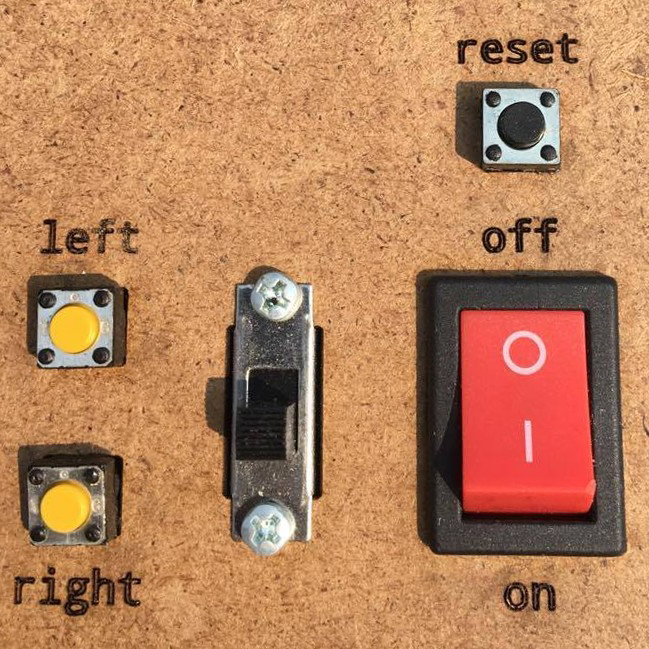
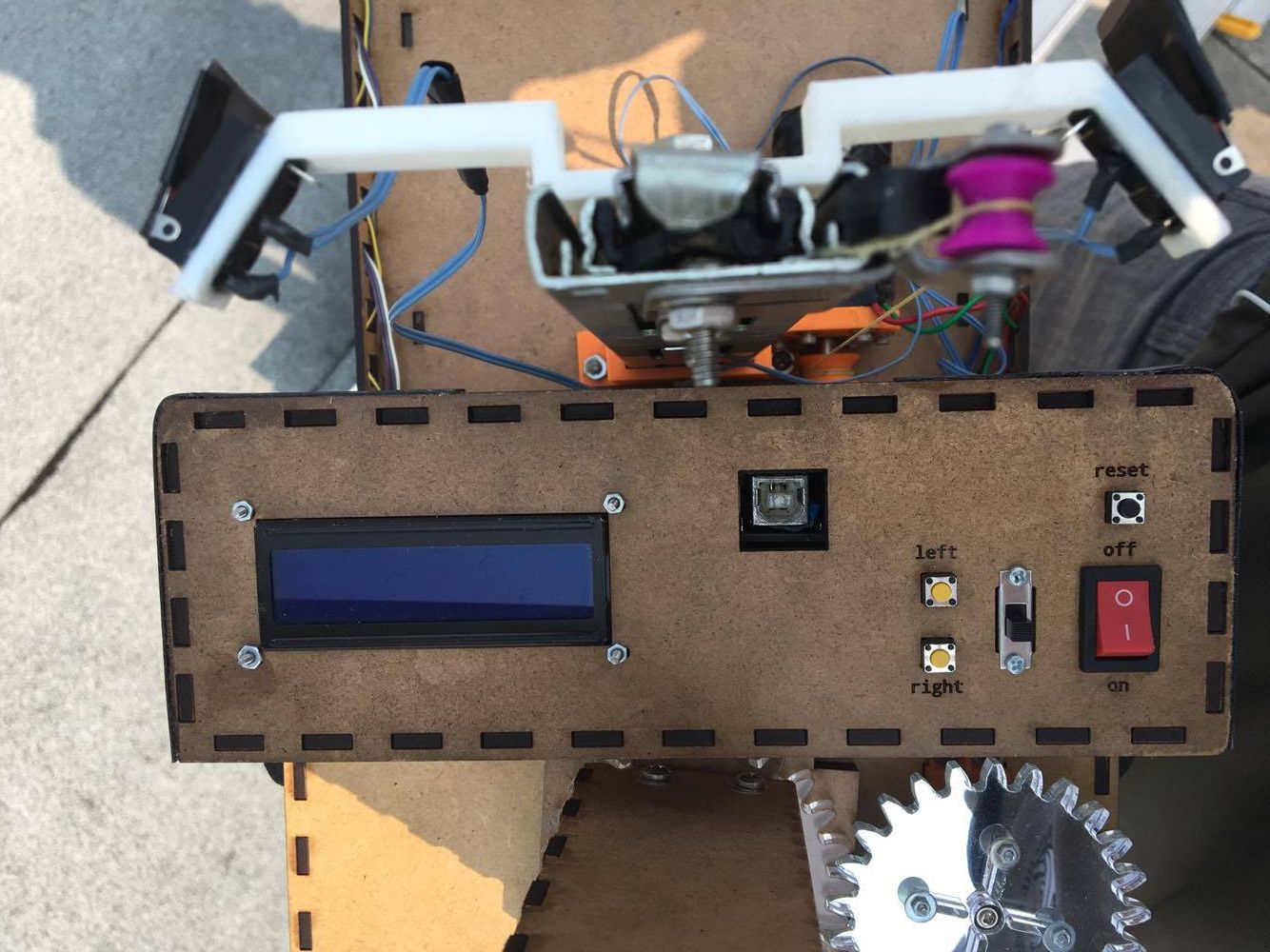
Easy Access Controls
The TINAH's controls were connected to easily accessible buttons mounted on the top panel of the robot.
Our code was written in the Arduino IDE using C and compiled onto a TINAH board, a powerful microcontroller developed by UBC. We used a main file that called functions from various header files.
In order to accurately follow the black tape, PID control was implemented.
A retrieval protocol was written for each toy. Lalo was even able to pick up two toys in one stop.
Lalo needed the ability to raise the zipline mechanism to its maximum height and place the toys on the zipline.

Mechanical

Electrical

Mechanical
Software